|

|
 |
Profile: Steve Zingelewicz
|
 |
|
|
|
|
| Bio |
![]() |
Tips |
![]() |
Bots |
![]() |
|
|
|
|
|
|
| Rocky -
August, 2000 |
|---|
| Image Not Available |
Rocky was the first BattleBrick I fielded. His basic design was this: [_] Two "fists" with touch sensors on them and the RCX in the middle
making up the body. The idea was that when the robot came into contact with something, it would swing back and forth rapidly, attempting to
punch the other 'bot. |
| Rocky II -
September 25th, 2000 |
|---|
 |
Rocky II was an update to the punching concept developed with Rocky. Instead of having the two fists, there was a central ramming arm
connected to a 40 gear. As the gear was spun, it would pump the main clubbing arm back and forth, punching the other bot. The idea was to
create a jackhammer type motion that would pummel the opposition into oblivion. Unfortunately, the gearing needed to make the punch powerful
made the punching action much too slow to do any real damage. It did look cool however. |
| Jaw of Life -
October 8th, 2000 |
|---|
 |
This robot attempts to incapacitate the enemy by using its highly geared lifting arm to flip other bot's. The gearing for the arm consisted
of two 8-40 gears which gave an overall reduciton of 25 to 1. It also used a primitive proximity detector to detect when another 'bot was in
front of it. One unique aspect of this 'bot was the use of two touch sensors at the top and bottom of the arm's arc in order to prevent the arm
from ripping itself apart on the robot's body.
The problem with this 'bot was that it would drive into a wall and lift it's arm up. When it brought the arm back down, it would catch the
wall and lift itself up, lifting its own treads off the ground in the process. The robot would then be wedged against a wall until another
robot came along and bumped it off. |
| Greg Luganis -
Decembr 15th, 2000 |
|---|
 |
GL tried to have a double rotating scythe at the front to tear other 'bots to shreds. It didn't work. He looked more like he was swimming. Hence, Greg Luganis. |
| Garrison Feeler -
January 9th, 2000 |
|---|
 |
This robot was more concerned with staying on the table than having any offensive capability. On its own, it did a fine job of staying on the
table. Unfortunately, with other 'bots weighing roughly twice what it did pushing it, the story was different.
This robot took a tragic plunge off the table, with no one there to catch it before it slammed into the ground. The RCX exploded, disgorging
its payload of batteries onto the floor. They were not recovered and replaced in time to save the memory. The robot ultimately suffered
the consequences of a massive head injury and was unable to continue the fight |
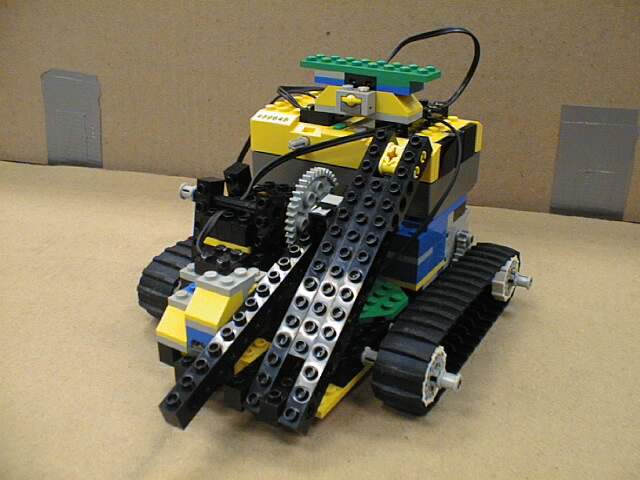
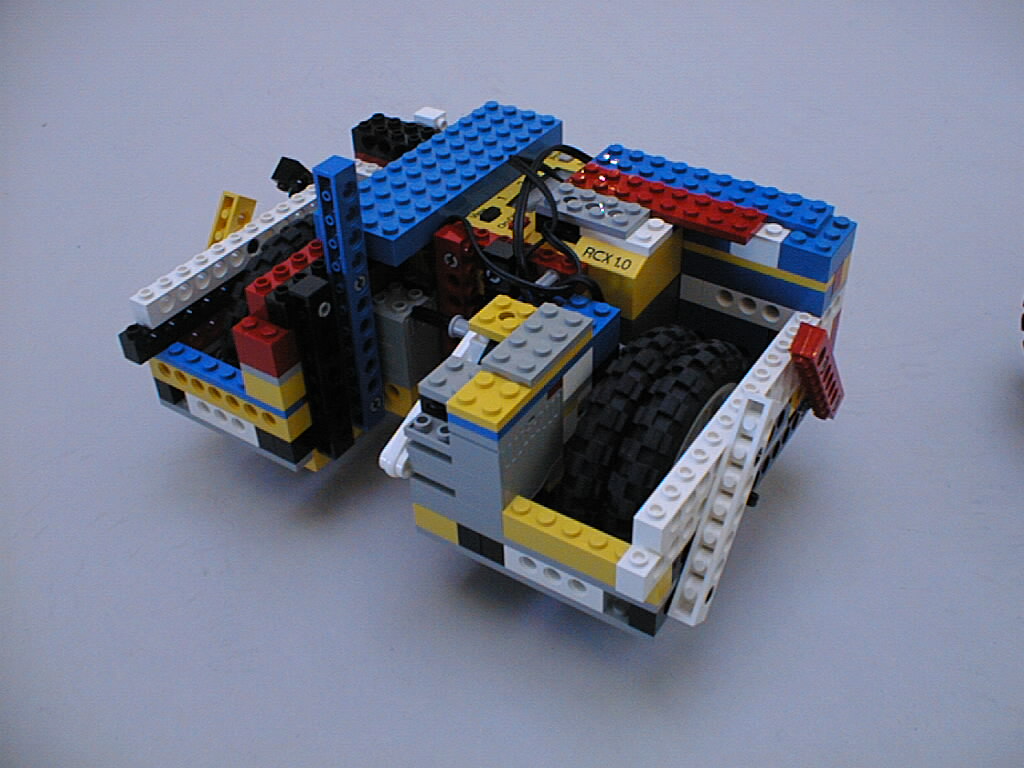
| Bill -
January 24th, 2000 |
|---|
 |
Bill's main method of attack was to try to pull other robots up on to the inclined tracks in order to flip them. He was sturdily built and did not lose a single piece during the competion (Except for the Lego(TM) flag). The most novel thing about Bill was the compact
drive system for the tracks in the front. Using a worm gear, the motor was actually positioned behind and below the track assembly. This provided for a well protected drive system for the tracks and also, a very high mechanical advantage (24 to 1). The tracks also allowed
Bill to pull himself up and over various obstacles he might encounter. This was also the first introduction of my compact caster design. I needed a caster that would be as low to the ground as possible, so that I could position the tracks as low to the ground as possible.
The compact caster can be seen in Flail too. |
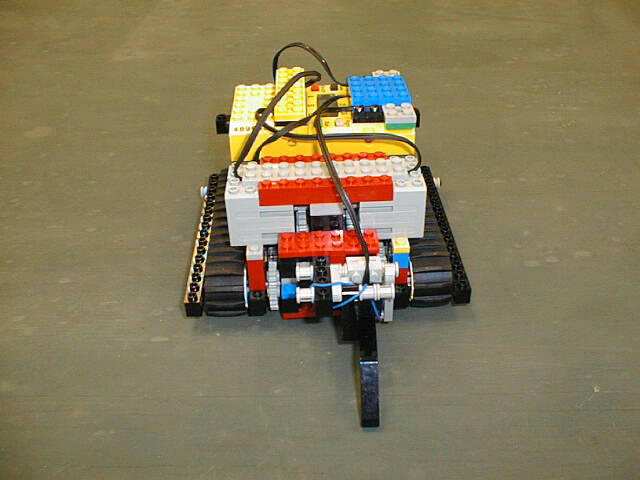
| Flail -
February 23rd, 2000 |
|---|
 |
Flail was the first RC 'bot I developed. His main method of attack was a large spinning arm positioned in the center of the chassis. The chassis was built from the ground up to be a stable platform to offset the shaking caused by the rotation of the arm.
Flail was built very low to the ground so that the arm would be at such a height to be able to hit other robots and not pass over the top of them. This low, wide stance made Flail fairly flip-over resistant.
The other cool feature of Flail was the extending arm. In order to protect the arm from breaking off during the competion, the arm started out folded up in the center of the 'bot. When it was spun up, the centrifical force would snap the arm into the fully
extended position, doubling it's reach. The arm, when stopped going the proper direction, would fold back into it's stowed position, protected from attack once again.
Flail also had multiple arm configurations. A second arm could be attached to the first to make a dual-spinning blade of death. |
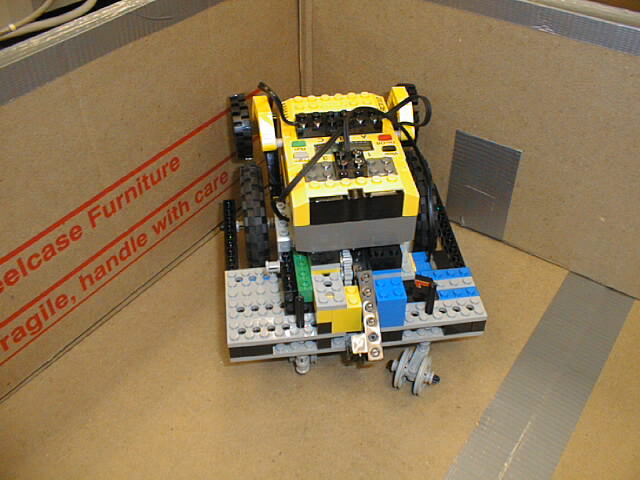
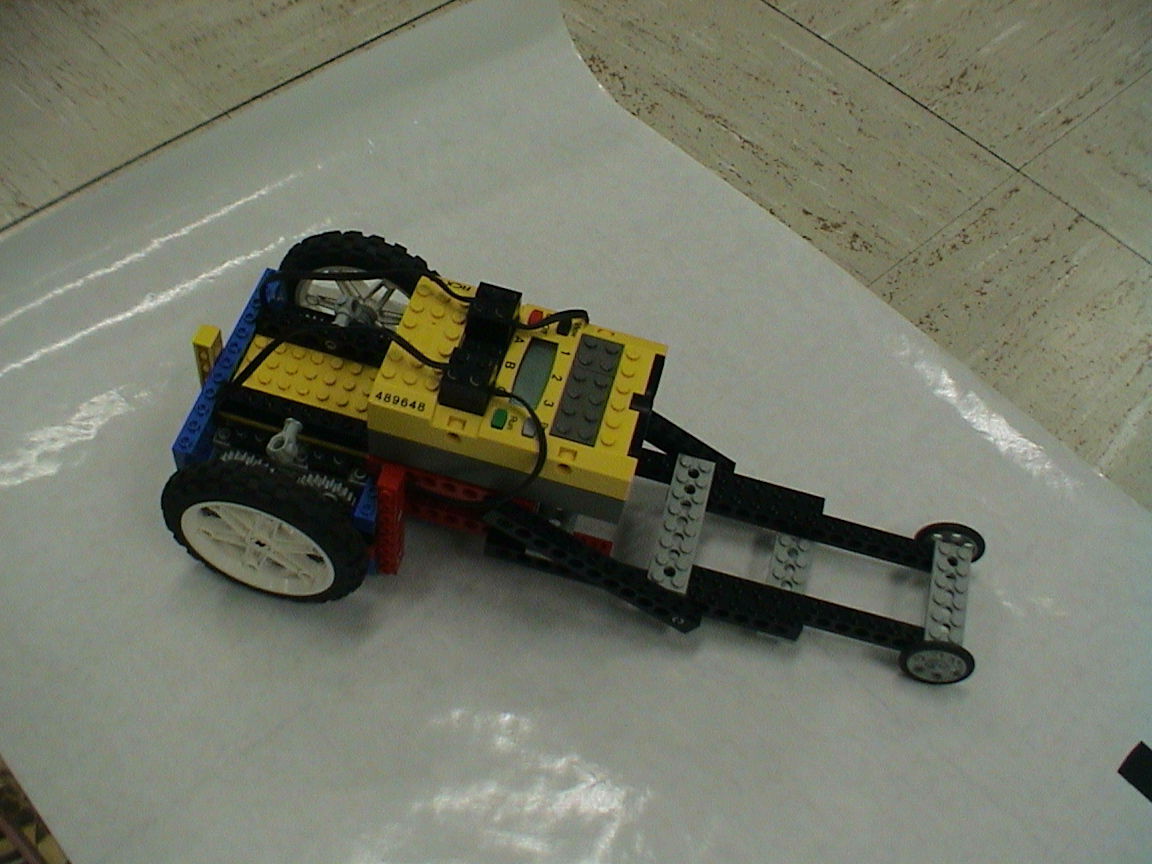
| Ferdinand -
February 2nd, 2002 |
|---|
 |
The bot's name really wasn't Ferdinand, but I couldn't think up anything else at the time of this writing.
Nothing spectacular about this bot, other than the fact that it's about 1/2 of the size of a sheet of paper. 3:1 gear ratio with a
2 wheel per axle design. The big wheels are essential for a fast bot with a some power too. Kicker mechanism worked ok. It was
just a spinning rod that could trap and kick the ball. Also, the second use of "nudge" mode for the control code. Nudge mode is
just that, whenever you hit the right and left finger buttons on the controller, it nudges the bot left or right without changing
its forward or reverse momentum. This is great for minor course corrections while driving in a relativly straight line. My
original soccer bot also had this but unfortunately, we don't have pictures from that battle |
| Hippobotamus -
March 2, 2002 |
|---|
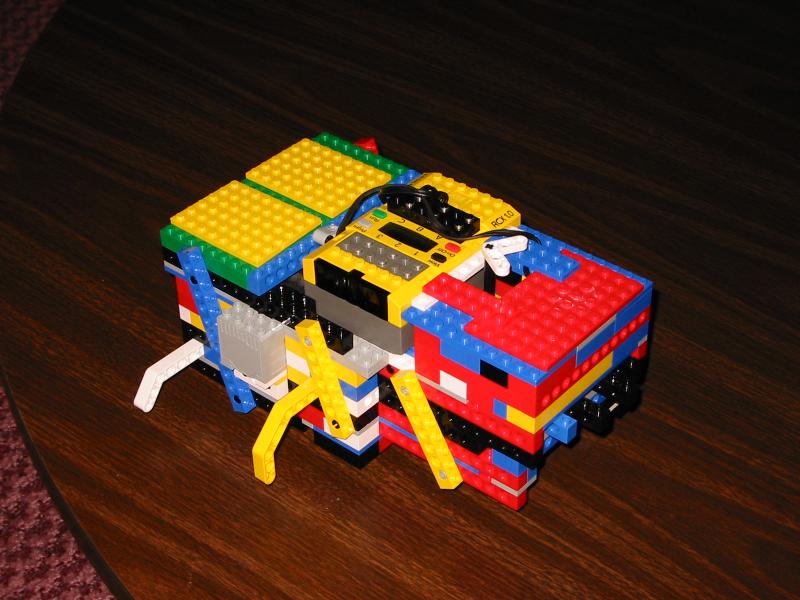 |
Hippobotamus is a fairly descriptive name for this bot. It was big, heavy, powerful, and slow. Four large wheels were put on a single shaft with two drive motors. The drive wheels were in the center of the bot with the drive motors on the egdes. This gave a wide, grippy surface with a goodly amount of weight on the wheels.
The drive system was a centered steering wheel controlled by a single motor. A turn would cause the motor to turn on and off quickly, turning the wheel about 15 degrees. Driving it was difficult because it was too easy to get the wheel perpendicular to the plane of travel. |
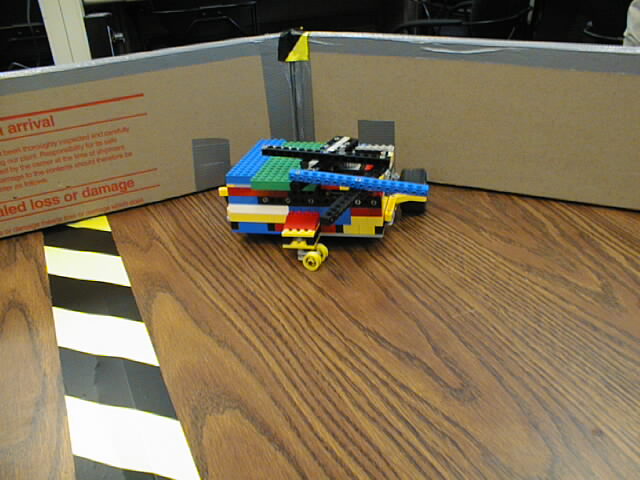
| Rad Racer -
October 17, 2002 |
|---|
 |
Simple design. No fancy transmissions. No steering. No intelligence what-so-ever. Just four motors with a 1 to 3 gear ratio. The front of the racer was elongated to prevent the bot from going off course. The RCX could be placed in several positions in order to try to change the weight balance from the middle of the bot to almost completely over the wheels for better traction. Having a simple design allowed the bot to be very light, fast, and pretty much dead on straight. It made the 30 ft run and was only a few inches off of center. |
|
|
|
|
|
|
|
|
|